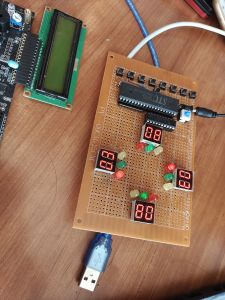
这个交通灯是在姐姐的帮助下完成的,因为我用的一直是电开发的单片机嘛,所以对这个交通灯所用的STC89C51RC不是很熟悉。首先是购买元件,在网上购买了一套交通灯的元件,店家还赠送了原理图,然后就是根据原理图焊接(老费眼了),焊接部分花了很多时间。最后是程序方面,我找了很多博主的程序进行参考,然后在姐姐的帮助下完善程序。这个交通灯可以通过按键调整红绿灯时间,进入禁止通行状态(全红灯),切换红绿灯方向等。
实物

程序(一部分)
#include <reg51.h>
#define uchar unsigned char
#define uint unsigned int
uchar data buf[4];
uchar data sec_dx=20;
uchar data sec_nb=30;
uchar data set_timedx=20;
uchar data set_timenb=30;
int n;
uchar data countt0,countt1;
sbit k4=P3^7;
sbit k1=P3^5;
sbit k2=P3^6;
sbit k3=P3^4;
sbit k5=P3^1;
sbit k6=P1^5;
sbit Red_nb=P2^6;
sbit Yellow_nb=P2^5;
sbit Green_nb=P2^4;
sbit Red_dx=P2^3;
sbit Yellow_dx=P2^2;
sbit Green_dx=P2^1;
bit set=0;
bit dx_nb=0;
bit shanruo=0;
bit yejian=0;
uchar code table[11]={
0x3f,
0x06,
0x5b,
0x4f,
0x66,
0x6d,
0x7d,
0x07,
0x7f,
0x6f,
0x00
};
void delay(int ms);
void key();
void key_to1();
void key_to2();
void key_to3();
void display();
void Buzzer();
void main()
{
TMOD=0X11;
TH1=0X3C;
TL1=0XB0;
TH0=0X3C;
TL0=0XB0;
EA=1;
ET0=1;
ET1=1;
TR0=1;
TR1=0;
EX0=1;
EX1=1;
P2=0Xc3;
sec_nb=sec_dx+5;
while(1)
{
key();
display();
}
}
void key(void)
{
if(k1!=1)
{
display();
if(k1!=1)
{
TR0=0;
shanruo=0;
P2=0x00;
TR1=0;
if(set==0)
set_timedx++;
else
set_timenb++;
if(set_timenb==100)
set_timenb=1;
if( set_timedx==100)
set_timedx=1;
sec_nb=set_timenb ;
sec_dx=set_timedx;
do
{
display();
}
while(k1!=1);
}
}
if(k2!=1)
{
display();
if(k2!=1)
{
TR0=0;
shanruo=0;
P2=0x00;
TR1=0;
if(set==0)
set_timedx--;
else
set_timenb--;
if(set_timenb==0)
set_timenb=99;
if( set_timedx==0 )
set_timedx=99;
sec_nb=set_timenb ;
sec_dx=set_timedx;
do
{
display();
}
while(k2!=1);
}
}
if(k3!=1)
{
display();
if(k3!=1)
{
TR0=1;
sec_nb=set_timenb;
sec_dx=set_timedx;
TR1=0;
if(set==0)
{
P2=0X00;
Green_dx=1;
Red_nb=1;
sec_nb=sec_dx+5;
}
else
{
P2=0x00;
Green_nb=1;
Red_dx=1;
sec_dx=sec_nb+5;
}
}
}
if(k4!=1)
{
display();
if(k4!=1)
{
TR0=0;
set=!set;
TR1=0;
dx_nb=set;
do
{
display();
}
while(k4!=1);
}
}
if(k5!=1)
{
display();
if(k5!=1)
{
TR0=0;
P2=0x00;
Red_dx=1;
Red_nb=1;
TR1=0;
sec_dx=00;
sec_nb=00;
do
{
display();
}
while(k5!=1);
}
}
if(k6!=1)
{
display();
if(k6!=1)
{
TR0=0;
P2=0x00;
TR1=1;
sec_dx=00;
sec_nb=00;
do
{
display();
}
while(k6!=1);
}
}
}
void display(void)
{
buf[1]=sec_nb/10;
buf[2]=sec_nb%10;
buf[3]=sec_dx/10;
buf[0]=sec_dx%10;
P1=0xff;
P0=0x00;
P1=0xfe;
P0=table[buf[1]];
delay(1);
P1=0xff;
P0=0x00;
P1=0xfd;
P0=table[buf[2]];
delay(1);
P1=0xff;
P0=0x00;
P1=0Xfb;
P0=table[buf[3]];
delay(1);
P1=0xff;
P0=0x00;
P1=0Xf7;
P0=table[buf[0]];
delay(1);
}
|



 发表于 2022-2-19 12:04:16
发表于 2022-2-19 12:04:16


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡